Mood Brightener: ...more from Stay Homas. (Confination VIII)
Robot Sensors:
Our robot has two types of sensors in the base model. One is an ultrasonic ranger that works sort of like a bat with sound. There are also several IR sensors that use reflected IR light for slightly different purposes. We will start with some general ideas that apply to both of these sensors and then spend a little time exploring some specifics of each.
Both sensors use waves that are reflected from things in their field of view to gather their data. The ultrasonic ranger uses a 40 kHz ultrasonic wave ( well above human hearing though dogs can probably hear it) to bounce off obstacles in the direction it is pointed. The ranger has two parts, the sound wave generator and the receiver (the two eyes on top of the bot). The ranger only makes a sound when it is actually making a measurement. The IR sensors also have two parts -- an IR light (we'll talk about this more) that is on all the time (again, we can't see it) and an IR sensor.
Reflection:
Because both of these sensors are designed to depend on reflection to make their measurements it seems prudent to talk a little bit about the optics of reflection. Reflection comes in two broad types. Formally these are called specular and diffuse. From a conceptual point of view these are a lot like what we experience with glossy and matte finishes on many materials.
Specular or glossy reflections are redirect any wave that hits them in a very specific direction. Your mirror (speculum in latin I think) is an example. The light from your face hits the mirror and almost all of it comes right back to you and it is still organized in the same way so you see yourself in the mirror. Glare off the water of a lake is a similar example. You can also imagine that if I shine a flashlight on a mirror that is tilted relative to me the light goes off into the room somewhere and not back to me. This is an important consideration with our sensors. If the surface they are attempting to 'see' is tipped there may not be any wave the comes back to the detector.
An example of this that you may have heard about is the B-2 stealth bomber. Radar is a form of light that is widely used to keep track of planes. On most planes there is quite a bit of shiny aluminum that is pointed in every direction (because of the smoothly curved bodies and wings). As a result most planes reflect a fair amount of radar back to the source so we can 'see' them. As you can see in the image the B-2 has very small amounts of surface that point forward or any direction except up and down. The statement is that the B-2, which has a wingspan of almost 60 m, reflects about the same amount of radar as a large bird. Some of you will know that while this plane design is very difficult to detect it is also very difficult to fly and is prone to instabilities. Until we had significant computational tools to help the pilot fly the plane such a design was not safe to fly.
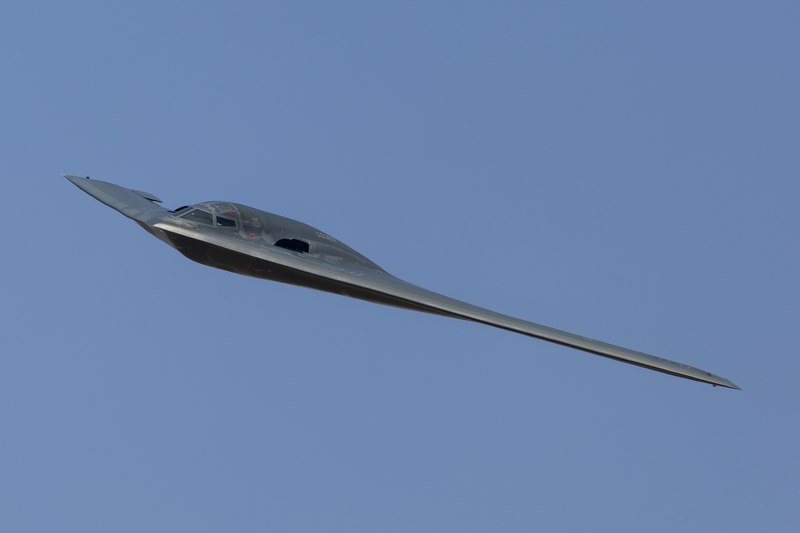
thanks to Balon Greyjoy
Diffuse reflection is the opposite of specular reflection. Sand, dirt, most clothing, trees, grass, and all rough materials reflect any light that hits them in many different directions. My skin is a diffuse reflector. If we were in a classroom you could all see me because light reflects off my skin in every direction to everyone's eyes. In a perfectly diffuse reflection it doesn't matter which direction the surface is pointed it reflects light in every direction including back towards the source.
Reality:
The reality that every surface is a little bit specular and a little bit diffuse. As we learn to use our sensors we will have to experiment to understand their limitations and the impact of different materials on the reflections we depend on. Very rough or irregular surfaces are mostly reflect light diffusely and smoother surfaces are more specular.
Ultrasonic Ranger: Details
We are already aware of the basic operating principles of the ultrasonic ranger. I recently discovered this lovely database that describes the various tools and sensors that are often used in the Arduino community. Their discussion of the ultrasonic ranger is here. This is provided for your reference in case you get curious and want to go deeper than we will go in this class. The important pieces of information for us are the following:
i) The ranger doesn't send out a sound wave until we tell it to.
ii) The minimum and maximum range are roughly 2 cm and 4 m respectively
iii) The precision of the measurement is better than 1 cm (maybe as small as 3 mm!)
iv) If we are concerned about precision we need to consider altitude and temperature because these affect the speed of sound which affects the distance determination.
We will explore the details of using the ranger on the robot in a lab dedicated to getting it working.
Because this device depends on reflected ultrasound we will have to determine is whether the ranger can 'see' a wall which is tilted relative to the robot or a stuffed animal which may not reflect as well. What do you think is likely?
IR Sensors: Details
An IR sensor works much the same way except it detects IR (infrared) light instead of sound. Because light travels so fast it is difficult with technology as simple as the robot to measure the travel time for the light being reflected back the way we do with the ultrasonic ranger. The speed of light is about 106 (a million) times faster than sound which makes the timing challenge extreme. The LIDAR that the autonomous vehicles in the DARPA challenge used are able to measure these extremely fast times but they have a much bigger budget than us. As a result the IR sensors on our robot only detect whether something reflective is there and NOT how far away it is.
There are 4 IR sensor systems on the Qbot. Two are on the bottom looking down (what?) and one on each front corner. Below is an image of one of them (they are all the same). One of the black dots is a IR flashlight and the other one is a detector.

One of the things I would want you to notice is that if you take a TV remote and point it at the IR sensor system (with the Qbot on) you will see a blue LED next to the sensor will turn on. This is the robot telling us that it 'sees' some IR light at that sensor. If you look carefully you can see that your TV remote is flashing a pattern which is how your TV knows what you want.
The end of your TV remote and the IR sensor are black plastic. This is because IR can travel through most (not all) black plastics as seen in these images from NASA. You'll notice that the bag is pretty much invisible in the infrared but the clear plastic lenses of his glass are opaque (black) in the infrared. An important reminder that different kinds of waves travel through materials differently.
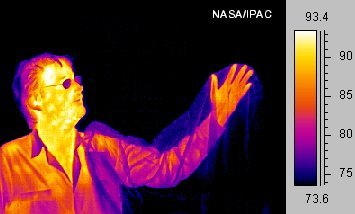

It bears mentioning that IR thermometers are what folks are using in these days of COVID to check your temperature without touching you. The thermometer is looking for a particular pattern of IR light that is determined by your body temperature. Notice the scale on the right side of the IR image. The IR sensors in our robot are not so sophisticated but still are useful.
As an aside for your amusement each TV model has it's own pattern that it recognizes as a request to turn itself off. This is why your remote works for your TV and not your neighbors unless it's the same model. TV-B-Gone is a project of Mitch Altman's that cycles through all the turn off codes for almost all TV's (the LED on the front is an IR LED). He created these because he was frustrated in some restaurants at the noise level from all the TV's. He created TV-B-Gone so he could turn them all off with the press of a button. Whether you think of this as civil disobedience or just being a jerk we've all been somewhere that we wish we could turn off the TV. Now you know how to be prepared.
The thing that's a little different about the IR sensor is that the reflection back into the detector depends on the color of the surface it is reflecting from. A white or shiny surface reflects lots of IR. A black or rough surface reflects very little. This allows for the possibility of following a black line using the two sensors on the bottom. A version of this (using fields instead of IR ) is how the robots in Amazon warehouses follow tracks in the floor. Here is short video of a line following robot competition (2ish minutes) at the University of Manchester. They are certainly using IR sensors for this competition. We could do this if you wanted:)
Assignment Breadcrumb Reading: Bb Quiz
Why Stealth:
What is the primary reason the B-2 Stealth Bomber is hard for any radar to see?
Before Next Class:
Assignment HW: Bb Quiz
Ultrasonic Ranger:
Imagine your robot is driving towards a wall which is slightly tilted. Will you be more likely to successfully measure a distance to the wall if the wall is smooth and shiny or rough like a concrete wall? Think about the reasons for your answer.
Assignment HW: Bb Quiz
IR Sensor:
IR sensors depend on the reflection of IR light from the surface in front of it. Assuming all of the following surfaces are flat some will be easier to detect than others. White paper, black plastic, blue masking tape, and dark green or blue cloth.You can test these using the sensors on your Qbot. If the obect is easier to detect the blue LED next to the sensor will come on when the object is further away.
Looking Ahead:
Look ahead to the next Breadcrumb: Models I
Assignment Breadcrumb Reading: Bb Quiz
Models:
The quiz will ask you a number of questions about the characteristics of scientific models. These will be true/false or multiple choice and you will have multiple attempts so that we can solidfy our understanding of scientific models.
